NOAA Great Lakes Environmental Research Laboratory

The NOAA Great Lakes Environmental Research Laboratory's Next Generation Great Lakes Coastal Forecasting System (GLCFS) is an experimental set of hydrodynamic computer models that predict lake circulation and other physical processes (e.g.thermal structure, waves, ice dynamics) of the lakes and connecting channels in a real-time nowcast and forecast mode. These research models provide timely information on currents, water temperatures, short-term water level fluctuations (e.g. seiche, storm surge), ice, and waves out to 120 hours into the future.
What is hydrodynamics?
Hydrodynamics is the study of fluids in motion which in this case is the movement of water-
in the Great Lakes and connecting channels.
Experimental real-time information
Great Lakes environmental conditions are updated every 12 hours as real-time information on the NOAA Great Lakes
Coastal Forecasting (GLCFS) website. Among the conditions forecasted are ice cover, water temperature, currents,
and water levels. These forecasts are considered experimental.
What is a nowcast?
A nowcast is a description of the present lake conditions based on model simulations using observed meteorology.
What is a forecast?
A forecast is a prediction of what will happen in the future. GLCFS models use current lake conditions and predicted weather
patterns to forecast the lake conditions for up to 5 days (120 hours) in the future.
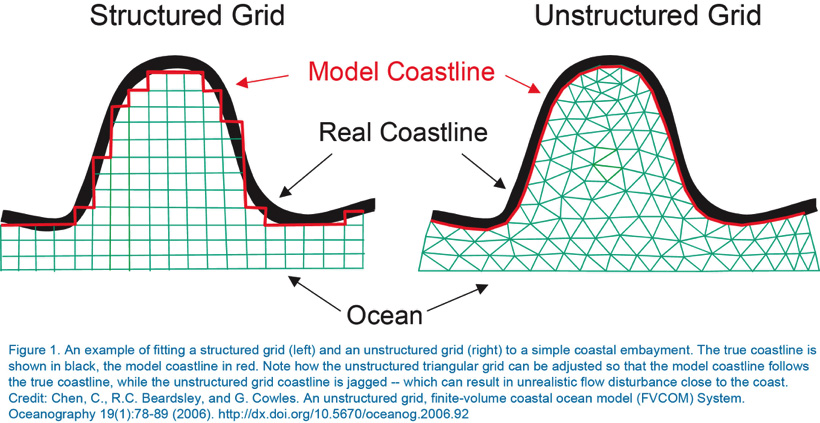
Structured vs. Unstructured Grid
A comparison of an unstructured versus structured grid used in hydrodynamic computer modeling
is graphically illustrated on page 80 of the journal Oceanography (Vol. 19, No. 1, Mar. 2006) article,
"An
Unstructured Grid Finite Volume Coastal Ocean Model (FVCOM) System" (Chen et al., 2006).
The GLCFS provides several features to enhance modeling capability in the Great Lakes and connecting channels, including:
The GLCFS hydrodynamic model is built on the Finite-Volume, primitive equation Community Ocean Model (FVCOM). FVCOM is a hydrodynamic computer model that predicts currents, temperature, water levels, and ice. The FVCOM nowcasts and forecasts are driven by the NOAA High-Resolution Rapid Refresh model (HRRR) model. The NOAA National Centers for Environmental Protection (NECEP) operational HRRR is most commonly used as forcing through the day 2 forecast period, followed by the Global Forecast System (GFS) output for long-range predictions.
Current Focus: Improving Great Lakes Wave Forecasts
The wave forecasting portion of the Great Lakes Coastal Forecast System (GLCFS) was recently upgraded to display the output from the flagship NOAA/NWS (operating at the National Center for Environmental Prediction) wave model known as WaveWatch III.
Evaluating Model Performance
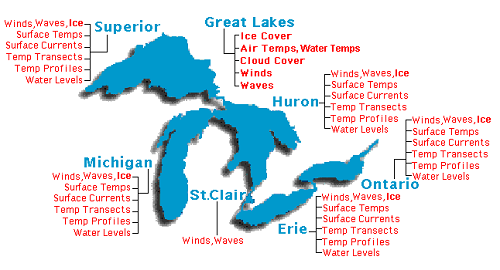
Observational data collected around the Great Lakes serve as a backup input data source for the GLCFS nowcasts and as sources for model verification. Such data include:
Using skill assessment metrics (statistical analysis for accuracy of predictions), model performance is determined for each predicted variable. Upon successful simulation for several hindcast years (historical simulations), the model is implemented into a real-time nowcast (present conditions) and forecast (future conditions) mode, and then transferred to NOAA operations within the National Ocean Service (NOS).
The current 3rd generation of the GLCFS is run in near real-time at NOAA’s Great Lakes Environmental Research Laboratory (GLERL), and operationally at NOAA’s National Ocean Service (NOS) under the name Great Lakes Operational Forecast System (GLOFS). -The GLOFS is a NOAA-automated model-based prediction system aimed at providing improved predictions of water levels, water currents and water temperatures in the five Great Lakes (Erie, Michigan-Huron,Superior,and Ontario) for the commercial, recreation, and emergency response communities. GLOFS generates hourly nowcast guidance (analyses) and four-times-daily forecast guidance of total water level, current speed and direction, and water temperature for each of the Great Lakes. The GLOFS predictions enable users to increase the margin of safety and maximize the efficiency of commerce throughout the Great Lakes.
Research to Operations: R2O
R2O is the pathway by which fundamental research is developed into a useful
tool or product and implemented into an automated or operational environment.
These tools and products provide routine real-time and forecast guidance for application
and use by the public.
The 3rd generation of the Great Lakes Coastal Forecasting System (GLCFS) is now
used operationally by the National Weather Service as a part of the Great Lakes
Operational Forecasting System (GLOFS). Continued research advances our forecasting
capabilities, and future versions of GLCFS transferred to GLOFS after proper testing.
The GLERL GLCFS and NOS GLOFS are based on the Great Lakes Forecasting System (GLFS, generation 0), originally developed by The Ohio State University (OSU) and GLERL in the late 1980s and 1990s under the direction of Dr. Keith Bedford (OSU) and Dr. David Schwab (NOAA GLERL). The original forecasting systems utilized the Princeton Ocean Model (POM) and used a set of uniformly structured bathymetric grids (illustrated in the sidebar on structured versus unstructured grids for hydrodynamic computer modeling). The first routine nowcast, using a low-resolution grid for Lake Erie, began at Ohio State University (OSU) in 1992.
Starting in 2002, GLERL’s semi-operational GLCFS was expanded to five lakes using medium-resolution grids (5 – 10 km) and 48-hr forecasts were added (generation 1). This version was successfully transferred from research to operations at NOAA NOS in 2010. The transition to operations at NOAA NOS was a joint effort between NOAA GLERL, NOS Center for Operational Oceanographic Products and Services (CO-OPS) and NOS Office of Coast Survey (OSC) Coast Survey Development Laboratory (CSDL), private industry (Aqualinks.com), and academia (OSU).
NOAA GLERL has continued to make improvements to the GLCFS; these include increasing the grid resolution (2 – 10 km), adding ice dampening and an ice model, and extending the forecasts to 120 hours during the period of 2006-2014 (generation 2). The current 3rd generation of the GLOFS is run in near real-time at NOAA’s Great Lakes Environmental Research Laboratory (GLERL), and operationally at NOAA’s National Ocean Service (NOS).
The next generation of the GLCFS (generation 3) continues to be advanced at NOAA GLERL through collaboration between GLERL and the Cooperative Institute for Great Lakes Research (CIGLR). It is based on the latest version of the FVCOM, and uses a very high resolution (30 meters – 2 km) unstructured grid (i.e., triangular shapes of adaptable size) framework (illustrated in the sidebar on structured versus unstructured grids for hydrodynamic computer modeling). This generation 3 version is currently being transitioned (R2O) to NOS CO-OPS as part of their GLOFS.